Есть у меня редуктор. Вот такой:

И собрана на нём модель. Которая ездит кругами, ибо скорость у моторчиков разная. Да ещё и крутящий момент отличается 🙂
И захотелось мне сделать ПИД-регулятор.
Но у редуктора на выходе всего 2 оборота в секунду. И если на выходной вал насадить диск энкодера, то процесс регулирования может несколько, кхм, затянуться.
В общем, разобрал я редуктор:
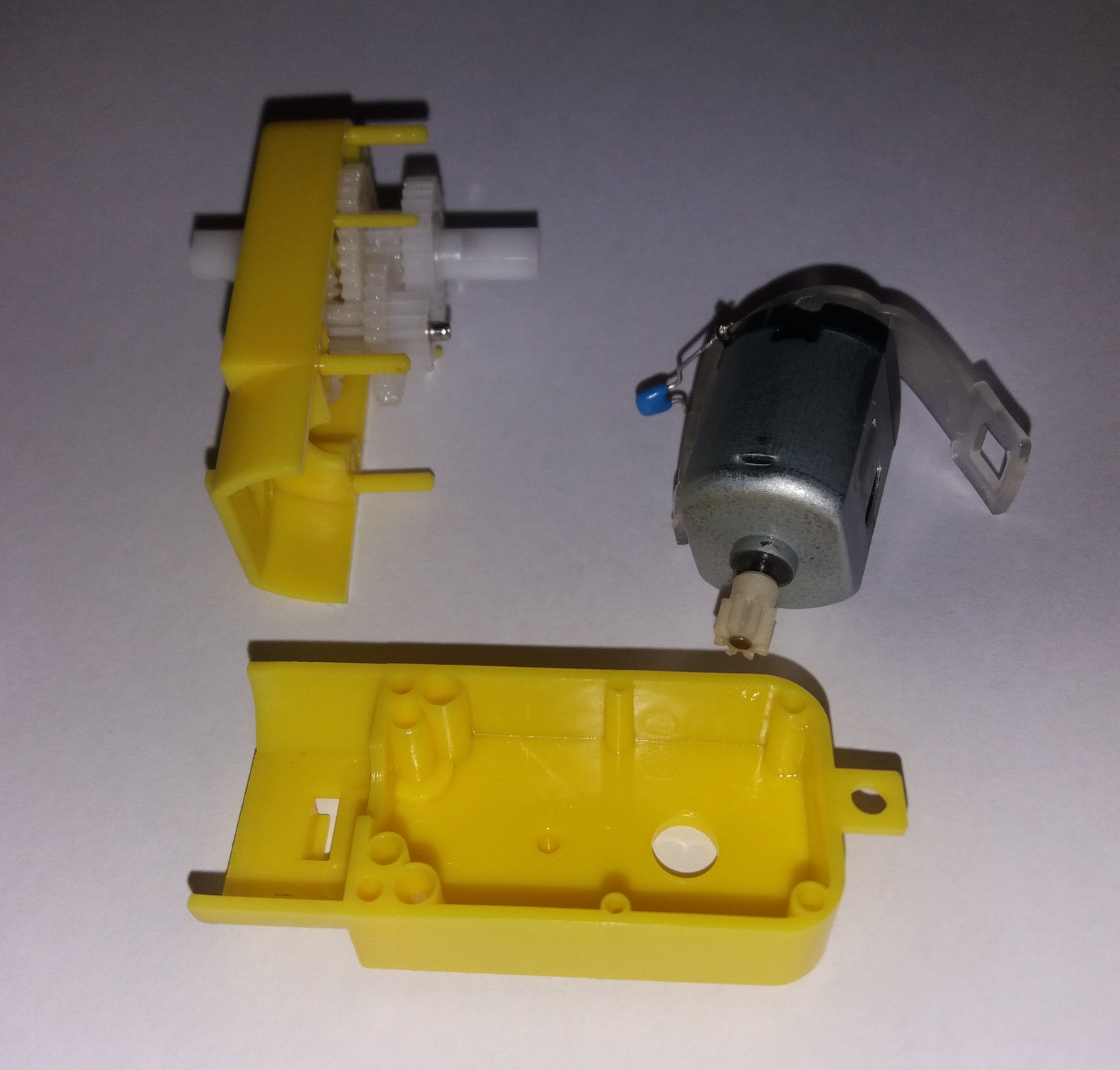
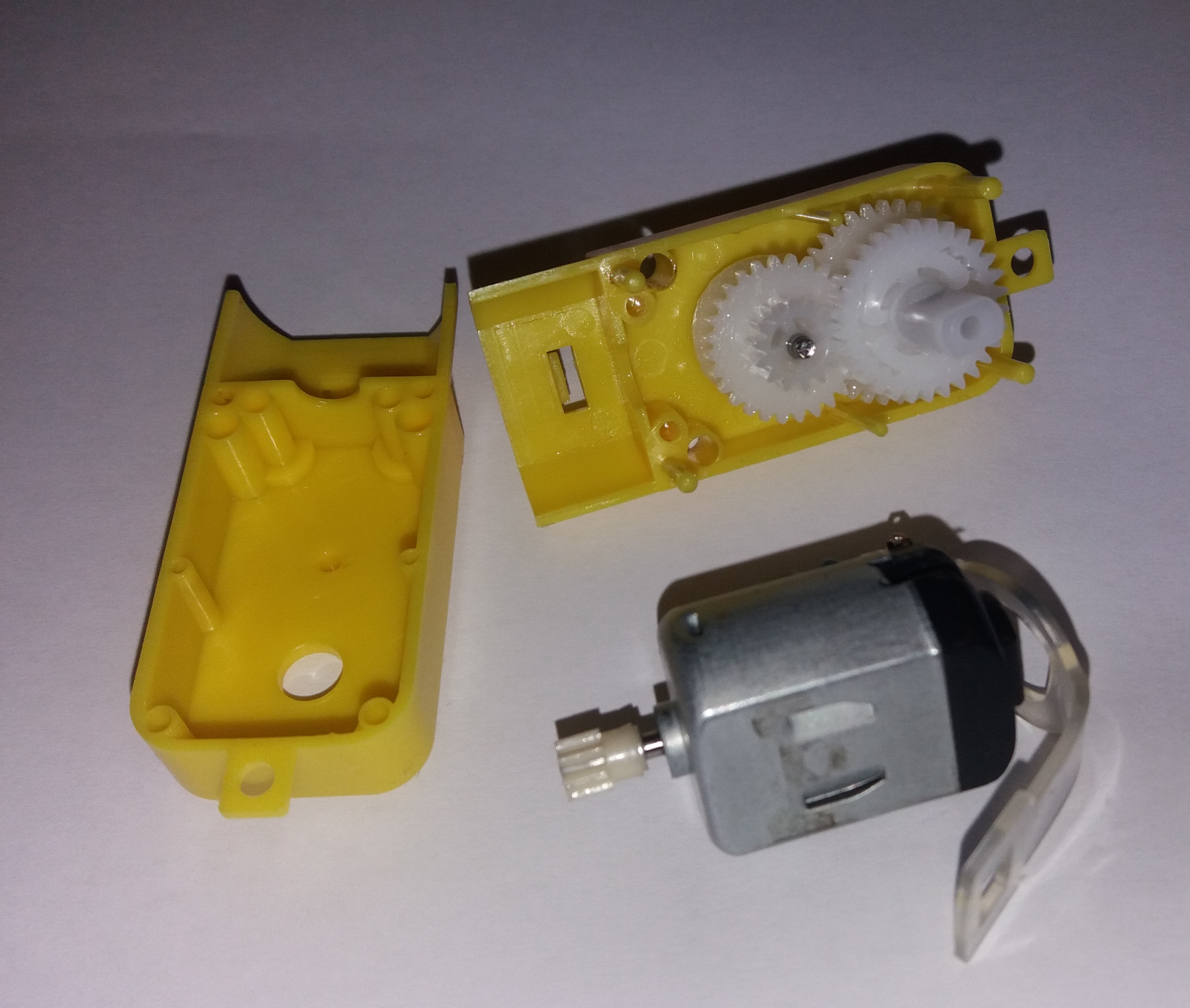
Места в нём немного. Поэтому идея прикрутить энкодер к мотору внутри – отпала.
Зато я нашёл в продаже моторчики с двумя валами:
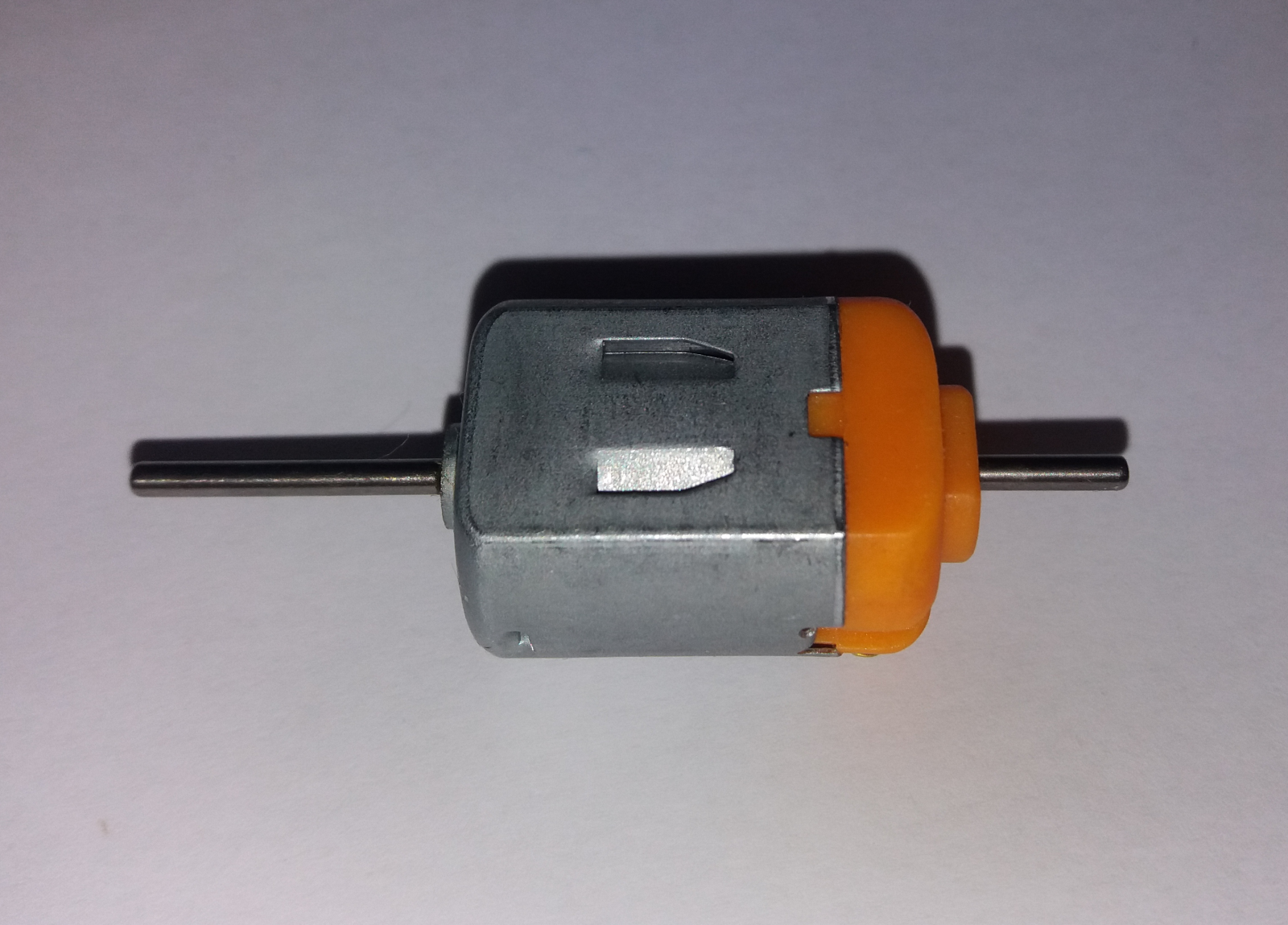
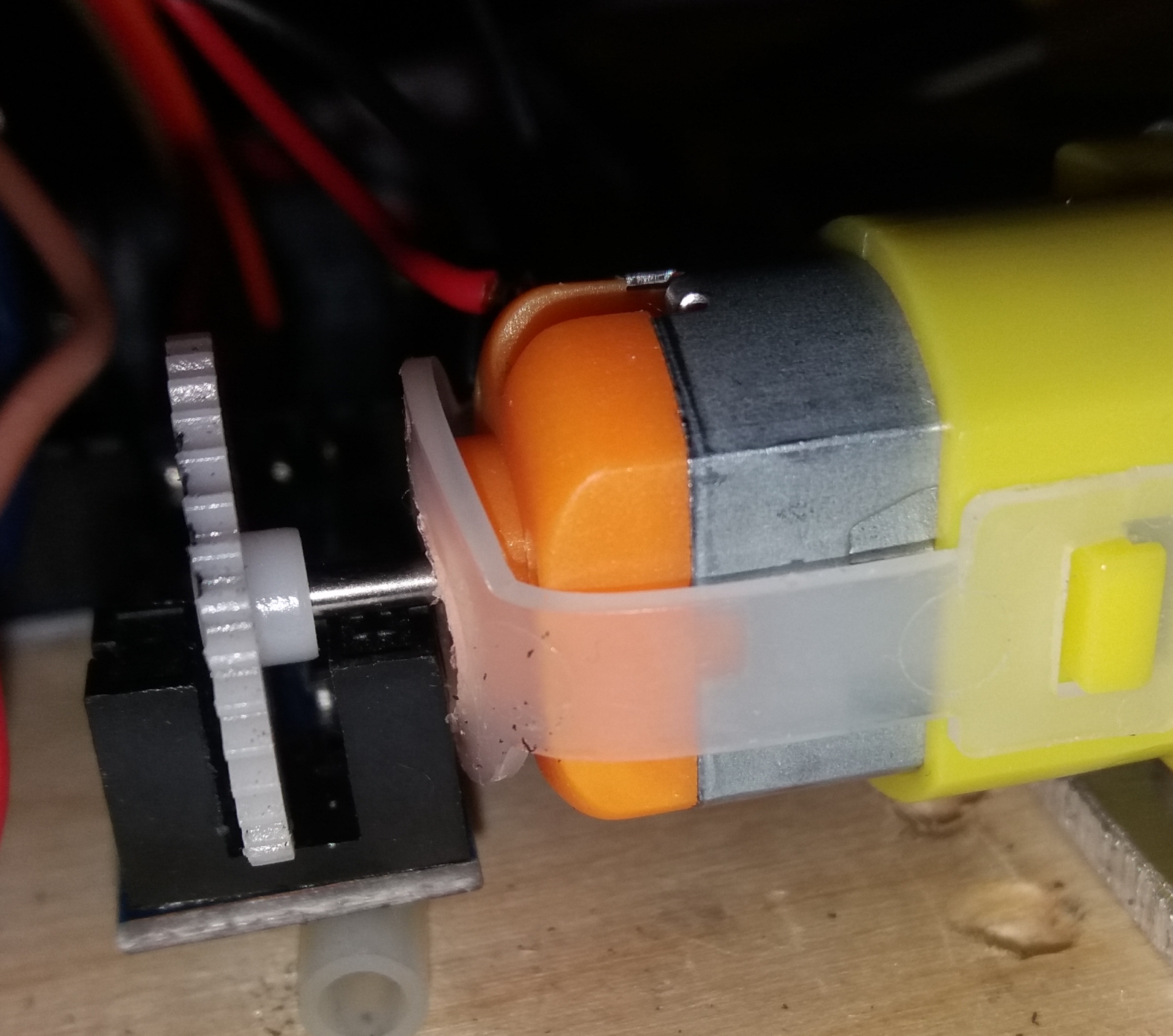
И если этот самый вал подрезать (он длиннее) и пересадить на него мелкую шестерёнку, то на заднюю часть вала, ту, что возле щёток, можно будет насадить энкодер.
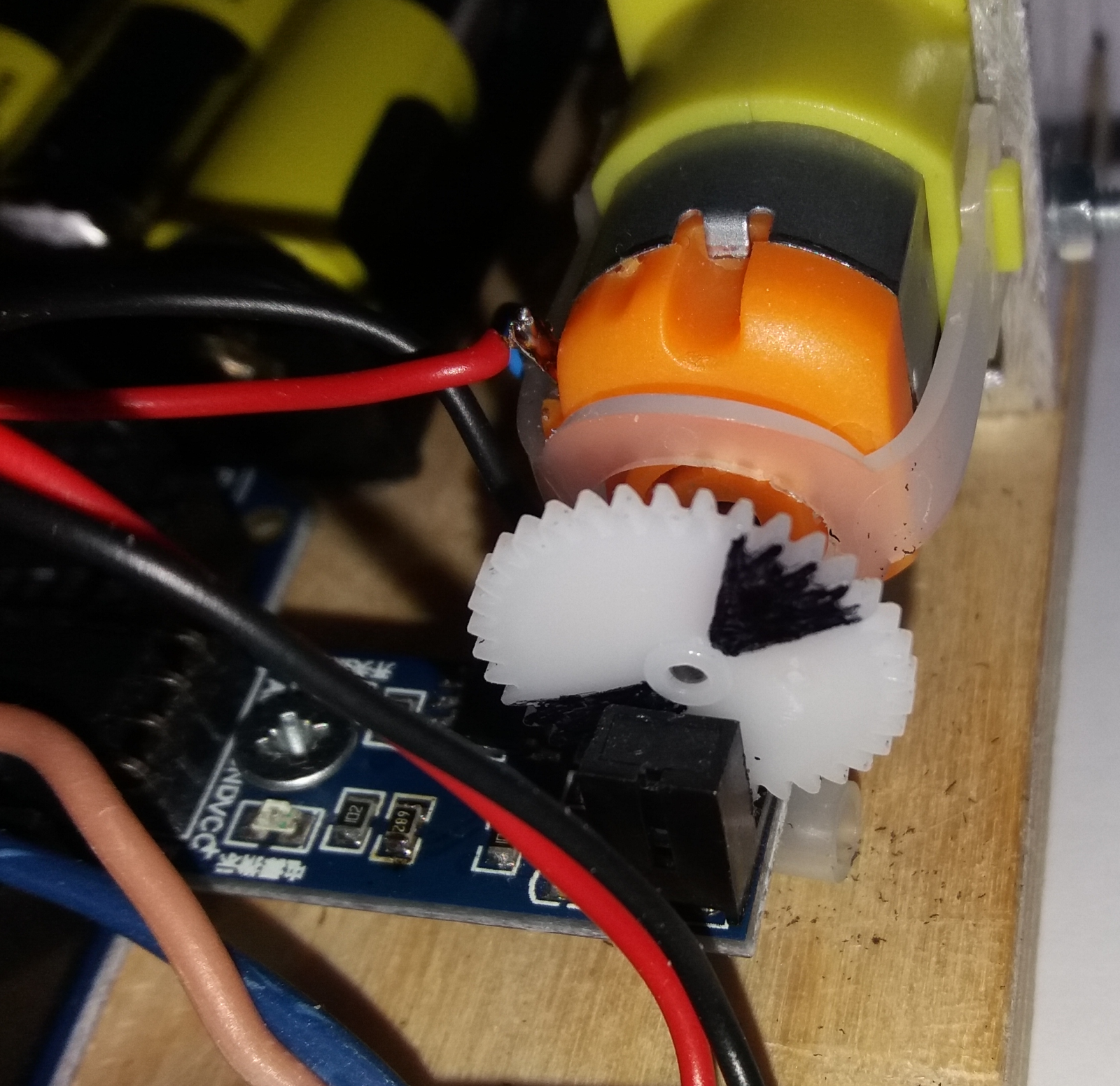
Правда, диск энкодера великоват, поэтому я просто взял белую красивую шестерню, и раскрасил её перманентым маркером! (Как оказалось, шестерня только на вид непрозрачная, ИК её отлично просвечивает. А вот перманентный маркер оказался для ИК непрозрачен).
После сборки получился адский девайс: